ならいハンドシリーズ TNH
製品カタログあり
動画あり
ワーク形状にならって吸着・把持!
小型軽量の汎用ロボットハンドです。
- ロボット・IT・IoT・フードテック:ロボットハンド、ピッキングロボット
製品・技術・サービスの概要
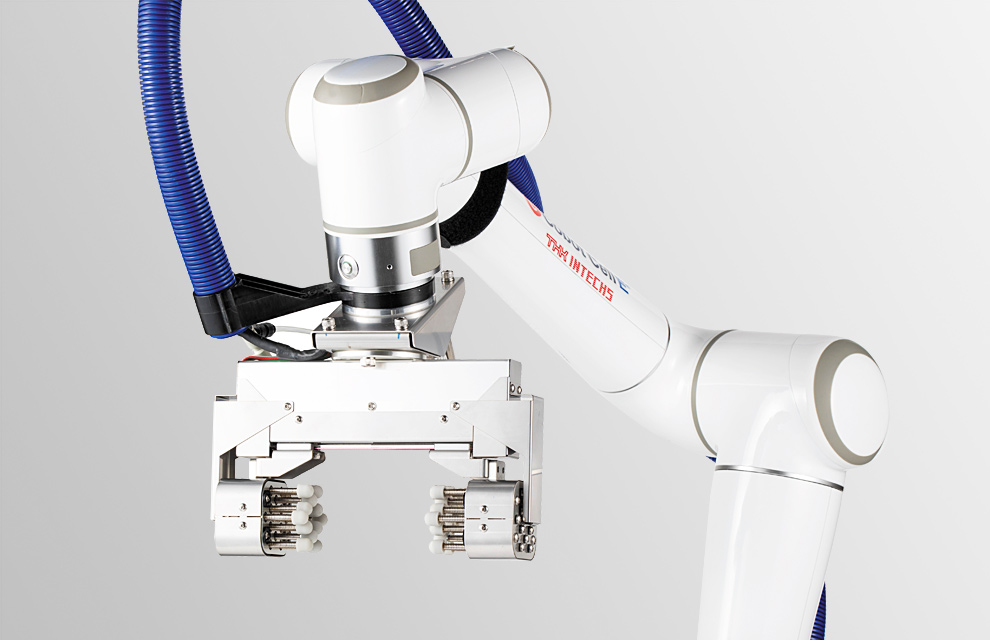
さまざまなワークの凹凸にシャフトをならわせてロックする“ならい機構”を採用し、安定して吸着または把持が可能な汎用ロボットハンドです。
コンパクトな設計で小型軽量、取付フランジはISO規格(ISO9409-1-50-4-M6)に対応しているため協働ロボットに最適です。
吸着エラーをカバーする絞り弁内蔵の「ならい吸着ハンド」、デジタル信号のみで開閉と把持力の制御が可能な「ならいグリップハンド」、用途に合わせてカスタマイズ可能な「ならいユニット」の3種類をラインナップしました。
製品の特長
| 特長① |
特長① ならい吸着ハンド・絞り弁を内蔵しているため、単一の真空源でありながら12個の吸着パッドのうち半数の吸着エラーがあっても吸着が可能 ・曲面や傾斜への追従性に優れた2.5段ジャバラ付吸着パッドを装備 ・吸着パッドは用途に応じて変更可能 ・エアのみで制御可能 |
|---|---|
| 特長② |
特長② ならいグリップハンド・プログラム可能なコントローラを内蔵 ・デジタル信号のみで開閉と把持力の制御が可能 ・把持力は4段階可変 ・専用ソフトで開閉速度と把持力の設定を変更可能 |
| 特長③ |
特長③ ならいユニット・ならいグリップハンドのカスタマイズ用にならい部のみを商品化 ・ロングストロークや大推力アクチュエータに取り付けることで、より広範囲なワークに対応 ・断面寸法□60mmに12本のならいシャフトを配置したコンパクトな設計 ・新たな動力源を必要としない、メカ式クランプ/アンクランプ機構 |